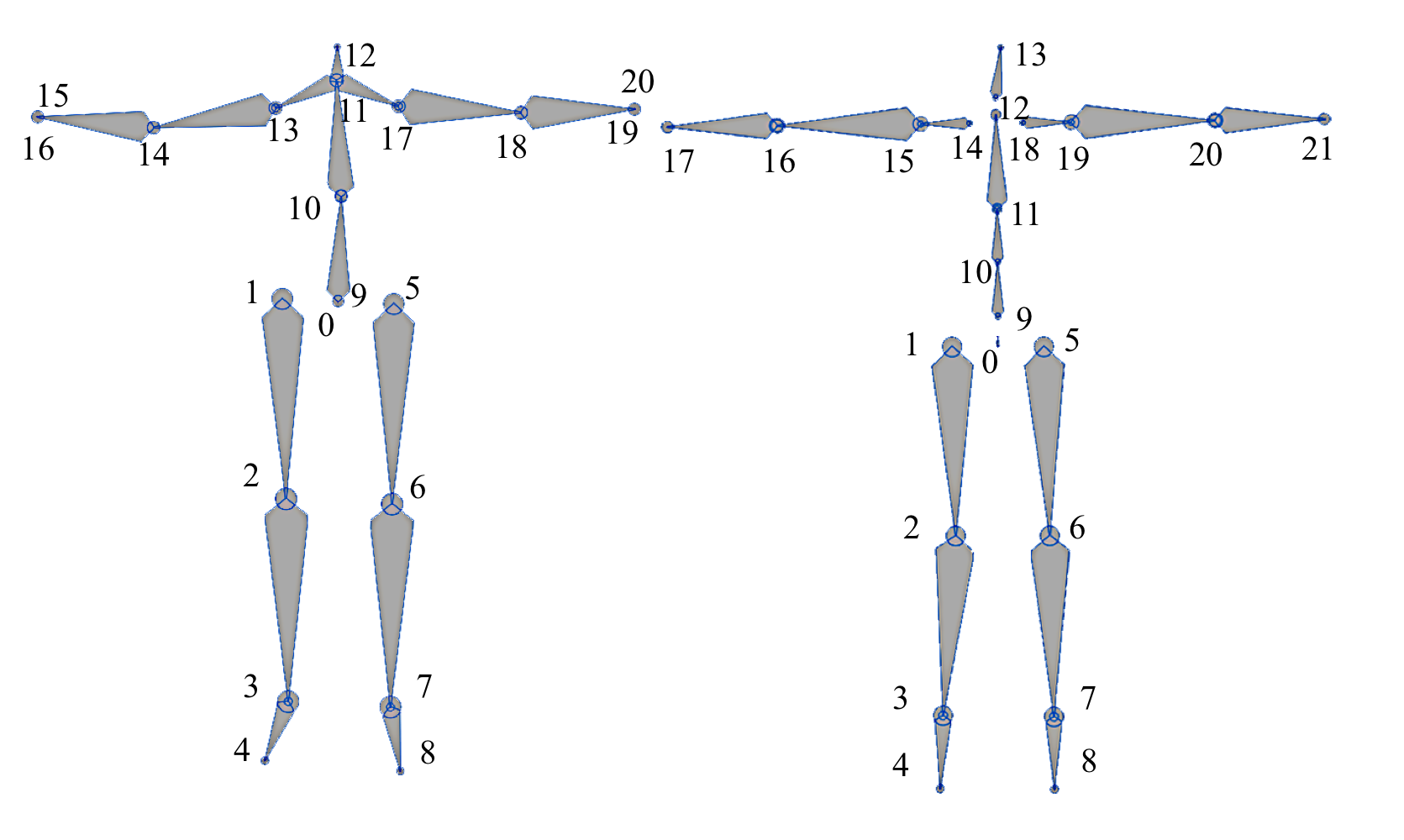
Method 정리 1. Observation 3가지의 파트로 나뉜다. simulated character의 observation (312차원) sensor로부터 sparse하게 오는 observation (162차원) scale of the user (1차원) 1) simulated character observation (총 312차원) 캐릭터는 33 dof, link는 총 16개 → joint의 angle (33차원) → joint의 angle velocities (33차원) → link의 Cartesian position (16*3 = 48차원, character local frame에 대해 표현된다.) → link의 orientations (16*6 = 96차원, rotation matrix의 앞..